
TYPOLOGY
Forward Models
CONTACT POINT
Nicolas BAGHDADI
ROLE
Principal investigator
nicolas.baghdadi@inrae.fr
support@eo-wimex.eu
WCM
The Water Cloud Model (WCM) is a physical model that simulates the total radar signal over agricultural fields. This model, unlike IEM-B and Dubois-B, simulates the radar signal with a vegetation cover. WCM was calibrated using C- and L-bands Synthetic Aperture Radar (SAR) data and Normalized Difference Vegetation Index (NDVI) values collected over cereals fields and grasslands [1,2]. In [1,2], a large dataset consisting of radar backscattered signal in VV and VH (at C-band) and in HH (at L-band) with wide range of incidence angle, soil moisture, surface roughness, and NDVI-values was used. It was collected over two agricultural study sites.
The Water Cloud model (WCM) developed by [3] is widely used because it can be easily performed in an inversion scheme to estimate soil moisture and vegetation parameters. For a given polarization (HH, VV or VH), the Water Cloud model defines the backscattered radar signal in linear scale (σ°) as the sum of the contribution from the vegetation (σ°veg), the soil (σ°soil) attenuated by the vegetation (T² σ°soil), and multiple soil-vegetation scatterings (often neglected):
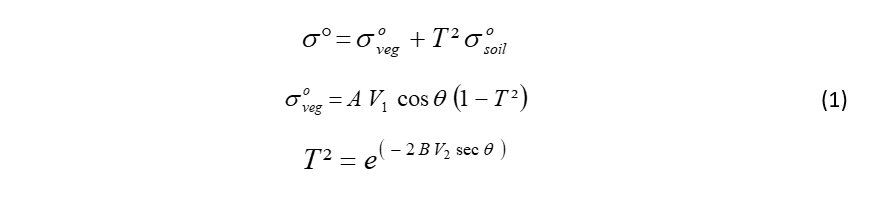
where V1 and V2 are the vegetation’s descriptors. V1 and V2 could be replaced by vegetation water content, leaf area index, or NDVI. NDVI is the easiest index to calculate from optical images. Thus, in this version of WCM, we consider V1 = V2 = NDVI; θ is the radar incidence angle (in degrees); A and B are fitted parameters of the model that depend on the vegetation descriptor and the radar configuration (wavelength and polarization); T² is the two-way attenuation.
The soil contribution that depends on soil moisture and surface roughness (in addition to SAR instrumental parameters) is simulated using IEM-B (or Dubois-B).
An experimental dataset was used, consisting of SAR images and ground measurements of soil moisture content and roughness collected over several agricultural study sites in France and Tunisia [1,2]. SAR images were acquired by various spaceborne sensors (ASAR, Sentinel-1, PALSAR-2). The radar data were available in L- and C-bands (~1.25 GHz and ~5.3 GHz, respectively); with incidence angles between 18° and 41°; and in VV (at C-band), HV (at C-band) and HH (at L-band) polarizations. NDVI values were calculated from Landsat and Sentinel-2 images corrected for atmospheric effects. In addition, in situ measurements of volumetric soil moisture (mv) were available for many reference plots. The soil water content was collected from the top 5 or 10 cm of each reference plot. The soil moisture ranged from 4 to 39.6 vol.%. The roughness was defined by the standard deviation of surface height (Hrms) available for each reference plot. Hrms surface height ranged from 0.7 to 4.6 cm.
The dataset in C-band was divided into two sub-datasets. The first sub-dataset (training dataset) combining data on Tunisia site was used to fit the WCM (ASAR and Sentinel-1 data). The second (validation dataset) contains only data acquired on French (Sentinel-1 data) was used to validate the agreement between the radar signal of the fitted WCM and the radar backscattered signal of SAR images. Concerning the dataset acquired in L-band over a study site in France, it was randomly divided into two sub-datasets: one for training and one for validation.
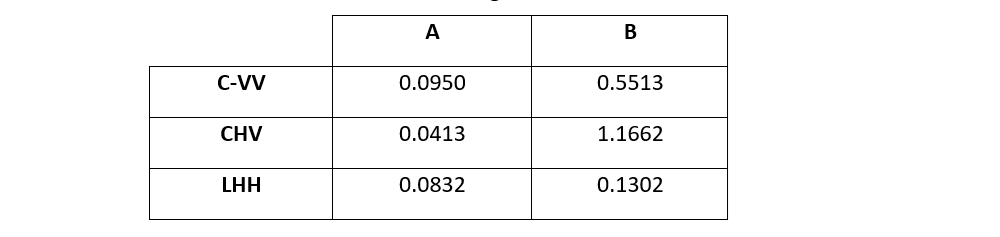
The WCM parameterization was performed using the training dataset. A and B parameters were estimated for C-VV, CVH and L-HH by minimizing the sum of squares of the differences between the simulated and measured radar signal (Table 3). With A and B parameters, it becomes possible to simulate WCM components (σ°veg and T²) and consequently the total backscattering coefficient.
Table 3. Fit of Water Cloud Model (WCM) parameters. N is the number of points used in the fitting.
Input variables:
- wavelength (Radar wavelength): This is the length of the radar wave used in the measurement.
- teta (Incidence angle): The angle at which the radar wave strikes the surface.
- mv (Surface Soil Moisture): Indicates the volumetric water content held within the soil.
- rms (Root mean square surface height): Measures the surface roughness.
- sand (percent of sand in the soil): The proportion of sand particles within the soil composition.
- clay (percent of clay in the soil): The percentage of clay particles within the soil.
- ndvi (Normalized Difference Vegetation Index): A standardized index allowing the assessment of live green vegetation.
Output variables:
- sigma_soil: The backscattering coefficient related to the soil component alone.
- sigma_wcmCVV or sigma_wcmLHH: These represent the composite model outputs for specific polarizations—CVV (circular transmit, vertical receive) or LHH (linear horizontal transmit, horizontal receive).
WCM: Water Cloud Model
IEM_B: Integral Equation Model modified by Baghdadi et al.
Dubois_B: Dubois model modified by Baghdadi et al.
Hrms: Root mean square surface height (soil roughness parameter)
θ: Incidence angle
NDVI: Normalized Differenced Vegetation Index
λ: Radar wavelength
k: Radar wave number (=2π/λ)
RMSE: Root Mean Square Error
SAR: Synthetic Aperture Radar
mv: Surface Soil Moisture
HH: Horizontal-Horizontal polarization
VH: Vertical-Horizontal polarization (VH=HV)
VV: Vertical-Vertical polarization
σ^0: Sigma naught backscatter
[1] Baghdadi N., El Hajj M., Zribi M., Bousbih S., 2017. Calibration of the Water Cloud Model at C-band for winter crop fields and grasslands, Remote Sensing, 9, 969; doi:10.3390/rs9090969.
[2] El Hajj M., Baghdadi N., Zribi M., 2019. Comparative analysis of the accuracy of surface soil moisture estimation from the C- and L-bands. International Journal of Applied Earth Observations and Geoinformation, 82(2019), 101888, doi.org/10.1016/j.jag.2019.05.021.
[3] Attema, E.P.W.; Ulaby, F.T. Vegetation modeled as a water cloud. Radio Sci. 1978, 13, 357–364.