
TYPOLOGY
Forward Models
CONTACT POINT
Nicolas BAGHDADI
ROLE
Principal investigator
nicolas.baghdadi@inrae.fr
support@eo-wimex.eu
IEM-B
The Integral Equation Model (IEM) [1,2] is widely used in inversion procedures of SAR images for retrieving soil moisture content and roughness. Its validity domain covers the range of soil parameter values encountered on agricultural soils. However, most studies reported discrepancies between modeled backscatters by IEM and observed backscatters by SAR sensors. These discrepancies were attributed by Baghdadi et al. [3-7] to the inaccuracy of the roughness measurements and to the model itself. A semi-empirical calibration of the backscattering Integral Equation Model was developed by Baghdadi et al. [3-7]. A large dataset of radar signal and in situ measurements (soil moisture and surface roughness) over bare soil surfaces were used. This dataset was collected over numerous agricultural study sites in the world using various SAR sensors at X-, C-, and L-bands. The new model called IEM-B (IEM modified by Baghdadi) was developed in HH, HV and VV polarizations at C-band, and in HH and VV polarizations at both X- and L-bands. This semi-empirical calibration of the IEM was performed in replacing the correlation length derived from field experiments by a fitting parameter.
In the IEM, the soil’s physical characteristics are taken into account using input parameters like the dielectric constant (εr), the standard deviation of surface heights (Hrms), the shape of the autocorrelation function (ρ), and the correlation length (L). The model also considers parameters of the sensor, such as the incidence angle, polarization, and radar frequency. The backscattering coefficient of the IEM in pp polarization (p = H or V) is expressed for a bare agricultural surface (surface contribution).
The semi-empirical calibration proposed by Baghdadi et al. replaced the measured correlation length, which is the least precise roughness parameter, with a forcing parameter (calibration parameter). The investigations showed that the calibration parameter depends on Hrms, radar incidence angle (θ), and radar frequency. The calibration parameter Lopt obtained with a Gaussian autocorrelation function (ρ) is described as follows:
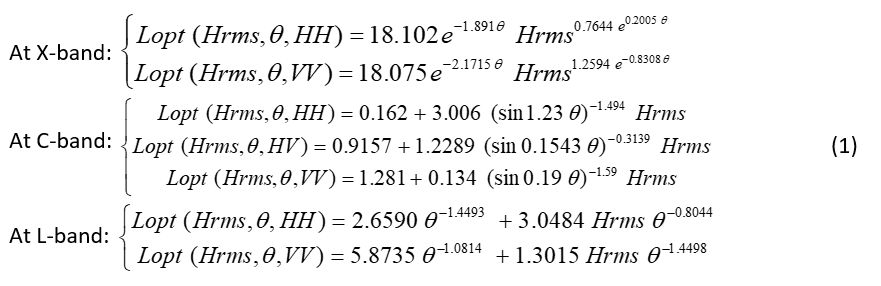
θ is in radians; Lopt and Hrms are in centimeters.
For one-dimensional roughness profiles, the autocorrelation function  is:
is:

This calibration has been performed using numerous databases, acquired at numerous study sites, with different radar sensors (ERS, JERS, RADARSAT, ASAR, PALSAR, TerraSAR-X, COSMO-SkyMed, SIR-C/X). Using the IEM with the calibration parameter Lopt allows considerable improvement of the adequacy between the model and SAR data. Furthermore, with this calibration, bare agricultural soil can be defined with only two surface parameters (standard deviation of heights “Hrms” and soil moisture “mv”) instead of four (Hrms, L, ρ, and mv).
Input variables:
- lambda_name (Radar wavelength): This parameter refers to the length of the radar wave used in the measurement.
- mv (Surface Soil Moisture): This represents the amount of moisture present in the soil,expressed as a percentage.
- Hrms (Root mean square surface height): A statistical measure that quantifies the roughness of the surface.
- Incidence (Incidence angle): The angle at which the radar signal impinges on the surface.
Output variables:
- IEM_VV (Backscattering coefficients σ° in VV): The backscatter coefficient in the vertical transmit, vertical receive polarization.
- IEM_HH (Backscattering coefficients σ° in HH): The backscatter coefficient in the horizontal transmit, horizontal receive polarization.
- IEM_HV (Backscattering coefficients σ° in HV): This output represents the cross-polarization backscatter coefficient (horizontal transmit, vertical receive).
IEM-B: Integral Equation Model modified by Baghdadi et al.
Hrms: Root mean square surface height (soil roughness parameter)
θ: Incidence angle
λ: Radar wavelength
k: Radar wave number (=2π/λ)
RMSE: Root Mean Square Error
SAR: Synthetic Aperture Radar
mv: Surface Soil Moisture
HH: Horizontal-Horizontal polarization
VH: Vertical-Horizontal polarization (VH=HV)
VV: Vertical-Vertical polarization
σ^0: Sigma naught backscatter
[1] Fung, A.K.; Li, Z.; Chen, K.S. Backscattering from a randomly rough dielectric surface. IEEE Trans. Geosci. Remote Sens. 1992, 30, 356–369.
[2] Fung, A.K. Microwave Scattering and Emission Models and Their Applications; Artech House, Inc.: Boston, MA, USA; London, UK, 1994; p. 573.
[3] Baghdadi, N., Holah, N., and Zribi, M., 2006. Calibration of the Integral Equation Model for SAR data in C-band and HH and VV polarizations. International Journal of Remote Sensing, vol. 27, no. 4, 805-816.
[4] Baghdadi N., Abou Chaaya J., and Zribi M., 2011a. Semi-empirical calibration of the Integral quation Model for SAR data in C-band and cross polarization using radar images and field measurements. IEEE Geoscience and Remote Sensing Letters, vol. 8, no.1, pp.14-18.
[5] Baghdadi N., Saba E., Aubert M., Zribi M., and Baup F., 2011b. Comparison between backscattered TerraSAR signals and simulations from the radar backscattering models IEM, Oh, and Dubois, IEEE Geoscience and Remote Sensing Letters, vol. 8, Issue 6, pp.1160-1164, DOI: 10.1109/LGRS.2011.2158982, NOV 2011
[6] Baghdadi N., Zribi M., Paloscia S., Verhoest N., Lievens H., Baup F., Mattia F., 2015. Semi-empirical calibration of the Integral Equation Model for co-polarized L-band backscattering. Remote Sensing, vol. 7, pp. 13626-13640, doi: 10.3390/rs71013626.
[7] Baghdadi N., Zribi M., 2016. Characterisation of soil surface properties using radar remote sensing. Chapitre book: Baghdadi N. and Zribi M. (eds), Land surface remote sensing in continental hydrology, p. 1-40, Septembre 2016, Elsevier, 502 pp.