
TYPOLOGY
Forward Models
CONTACT POINT
Nicolas BAGHDADI
ROLE
Principal investigator
nicolas.baghdadi@inrae.fr
support@eo-wimex.eu
Dubois-B
A new semi-empirical radar backscattering model for bare agricultural soils was developed by Baghdadi et al. [1] using a wide dataset of backscattering coefficients extracted from SAR (synthetic aperture radar) images and in situ soil parameter measurements (moisture content and roughness). This new model called Dubois-B was developed in HH, HV and VV polarizations using a formulation of radar signals based on physical principles that validated in numerous studies. The availability of a backscatter model for the cross polarization component is required because the most of spaceborne SAR acquisitions are made with one co-polarization and one cross-polarization in case of dual-polarization mode. The new model showed a very good performance for different radar wavelength (L, C, X), incidence angles (20°-45°), and polarizations (HH, VV, VH).
The Dubois-B model is based on the Dubois model and uses the dependency observed between the SAR signal and soil parameters according to results obtained in various studies. For bare soils, the backscattering coefficient depends on soil parameters (roughness and moisture) and SAR instrumental parameters (incidence angle, polarization and wavelength). For bare soils, the radar signal in pq polarization (p and q = H or V, with HV=VH) can be expressed as the product of three components:

The radar backscatter coefficient is related to the incidence angle (q) by the relation
The term
The last term
Finally, the radar-backscattering coefficient (s°) for bare agricultural soils can be written in linear scale as following:

The coefficients d, b, g and x in the equation (2) were estimated for each radar polarization using the method of least squares by minimizing the sum of squares of the differences between the measured and modelled radar signal. The error in the modelling of radar backscatter coefficients by the new backscattering model was assessed for each polarization using a 5-fold cross-validation to validate the predictive performance of Dubois-B model.
The fitting of various coefficients in the equation (2) was done using all dataset (fitting errors are about 2 dB for all polarizations). This fitting allows writing s
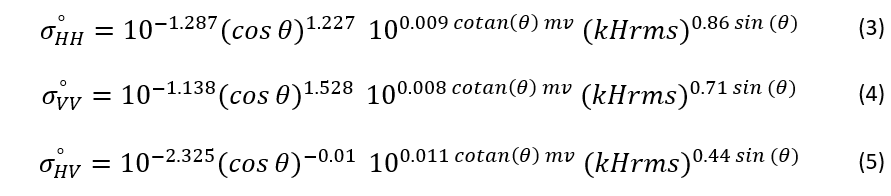
where q is expressed in radians and mv is in vol.%. Equations (3), (4), and (5) show that the sensitivity (g) of the radar signal to the soil moisture in decibel scale is 0.25 dB/vol.% in HH polarization (=10*0.009*cotan(20*3,1416/180)), 0.22 dB/vol.% in VV polarization and 0.30 dB/vol.% in HV polarization for an incidence angle of 20°. This sensitivity decreases to 0.09 dB/vol.% in HH, 0.08 dB/vol.% in VV and 0.11 dB/vol.% for an incidence angle of 45°. As for the signal’s sensitivity to soil roughness, it is of the same order of magnitude in HH and VV and twice as large than that of the HV signal.
Input variables:
- lambda_name (Radar wavelength): This refers to the length of the radar wave used in the measurements.
- Incidence (Incidence angle): The angle at which the radar signal strikes the surface relative to the normal (perpendicular to the surface).
- mv (Surface Soil Moisture): The volume of water contained within the upper soil layer,expressed as a percentage of the soil's total volumetric capacity.
- Hrms (Root mean square surface height): A measure of the surface roughness.
Output variables:
- Dubois_B_HH (Backscattering coefficients σ° in HH): This output represents the backscattering coefficient measured in the HH (horizontal transmit, horizontal receive) polarization.
- Dubois_B_VV (Backscattering coefficients σ° in VV): Similar to the HH output, but for the VV (vertical transmit, vertical receive) polarization.
- Dubois_B_HV (Backscattering coefficients σ° in HV): The backscattering coefficient in cross-polarization (horizontal transmit, vertical receive).
Dubois-B: Dubois model modified by Baghdadi et al.
Hrms: Root mean square surface height (soil roughness parameter)
θ: Incidence angle
λ: Radar wavelength
k: adar wave number (=2π/λ)
RMSE: Root Mean Square Error
SAR: Synthetic Aperture Radar
mv: Surface Soil Moisture
HH: Horizontal-Horizontal polarization
VH: Vertical-Horizontal polarization (VH=HV)
VV: Vertical-Vertical polarization
σ^0: Sigma naught backscatter
[1] Baghdadi N., Choker M., Zribi M., El Hajj M., Paloscia S., Verhoest N., Lievens H., Baup F., Mattia F., 2016. A new empirical model for radar scattering from bare soil surfaces. Remote Sensing, vol. 8, Issue 11, pp. 1-14, doi: 10.3390/rs8110920.